Cambiano le stagioni nel Cratere Jezero, dove Perseverance e Ingenuity conducono le loro esplorazioni, trivellazioni e ricognizioni aeree.
E sono soprattutto queste ultime che nelle passate settimane hanno dato qualche cruccio al team del JPL dedicato al controllo di Ingenuity, l’elicotterino NASA. La sua missione, che si prevedeva inizialmente sarebbe durata appena 5 voli di prova, ha attualmente superato i 7 mesi con 15 voli, 3.3 km percorsi e 27 minuti complessivi di operatività.
E sono soprattutto queste ultime che nelle passate settimane hanno dato qualche cruccio al team del JPL dedicato al controllo di Ingenuity, l’elicotterino NASA. La sua missione, che si prevedeva inizialmente sarebbe durata appena 5 voli di prova, ha attualmente superato i 7 mesi con 15 voli, 3.3 km percorsi e 27 minuti complessivi di operatività.
Il team si è così scontrato con delle condizioni atmosferiche in variazione a causa del cambio delle stagioni marziane, con l’aria che si fa ulteriormente rarefatta. Progettato per una densità atmosferica tra 0.0145 e 0.0185 kg/m3, i pomeriggi marziani presentano attualmente valori medi di 0.012 kg/m3. Come permettere a Ingenuity di volare anche con un’atmosfera così ulteriormente sottile, un centesimo di quella terrestre?
La soluzione è aumentare la velocità di rotazione della sua coppia di pale da circa 2500 a 2700 giri al minuto per aumentare il volume di aria spostata.
Prima di intraprendere delle verifiche con voli veri e propri, il 15 settembre (Sol 204) è stato eseguito un test al suolo che ha visto Ingenuity accelerare i suoi motori a 2800 rpm. La scelta di testare una velocità maggiore rispetto ai 2700 giudicati necessari è stata dovuta alla volontà di assicurarsi un adeguato margine di sicurezza. Molte le criticità addizionali che hanno tenuto la piccola squadra, diretta dal Chief Engineer Bob Balaram, a mangiarsi le unghie: maggior surriscaldamento dei motori, rischio di innesco di vibrazioni, comportamenti inattesi delle eliche le cui punte si avvicinano pericolosamente alla velocità del suono generando turbolenze.
Ma il test è stato un successo!
Prima di intraprendere delle verifiche con voli veri e propri, il 15 settembre (Sol 204) è stato eseguito un test al suolo che ha visto Ingenuity accelerare i suoi motori a 2800 rpm. La scelta di testare una velocità maggiore rispetto ai 2700 giudicati necessari è stata dovuta alla volontà di assicurarsi un adeguato margine di sicurezza. Molte le criticità addizionali che hanno tenuto la piccola squadra, diretta dal Chief Engineer Bob Balaram, a mangiarsi le unghie: maggior surriscaldamento dei motori, rischio di innesco di vibrazioni, comportamenti inattesi delle eliche le cui punte si avvicinano pericolosamente alla velocità del suono generando turbolenze.
Ma il test è stato un successo!
Ma non c’era troppo tempo per le pacche sulle spalle, l’intenzione era di provare subito un volo vero e proprio, sebbene ancora solo a livello di test.
Il 18 settembre (Sol 206) viene programmato un hovering (o stazionamento) della durata di 23 secondi a 5 metri dal suolo con breve traslazione di 2 metri da compiersi a 2700 rpm.
Ma qualcosa va storto: prima dell’avvio della sequenza, i sensori rilevano un’anomalia da parte di due dei sei motori servo che controllano l’angolo d’attacco delle pale di Ingenuity. Sebbene più piccoli e molto meno potenti dei due motori che fanno girare le eliche, il lavoro dei servo è cruciale per la stabilità dell’elicottero. Per questa ragione, prima di ogni volo ne è previsto il controllo all’interno di una check list che li aziona nel loro intero range di operatività.
Alcuni esempi di questi movimenti sono visibili nel video qui sotto, frutto di elaborazioni personali a partire da immagini scattate da Perseverance negli ormai lontani Sol 47, 48 e 49.
Il 18 settembre (Sol 206) viene programmato un hovering (o stazionamento) della durata di 23 secondi a 5 metri dal suolo con breve traslazione di 2 metri da compiersi a 2700 rpm.
Ma qualcosa va storto: prima dell’avvio della sequenza, i sensori rilevano un’anomalia da parte di due dei sei motori servo che controllano l’angolo d’attacco delle pale di Ingenuity. Sebbene più piccoli e molto meno potenti dei due motori che fanno girare le eliche, il lavoro dei servo è cruciale per la stabilità dell’elicottero. Per questa ragione, prima di ogni volo ne è previsto il controllo all’interno di una check list che li aziona nel loro intero range di operatività.
Alcuni esempi di questi movimenti sono visibili nel video qui sotto, frutto di elaborazioni personali a partire da immagini scattate da Perseverance negli ormai lontani Sol 47, 48 e 49.
Nei giorni successivi, 21 e 23 settembre, vengono eseguiti altri “ondeggiamenti” dei servo che vengono portati a termine senza problemi. La non ripetibilità dell’intoppo rassicura solo parzialmente il team il quale sospetta che Ingenuity, dopo 13 voli, cominci a soffrire l’usura di alcuni dei suoi componenti. L’analisi del guasto si prolunga, e al JPL si decide di rimandare il proseguimento dei test a dopo la congiunzione solare, che interromperà le comunicazioni con Marte per un paio di settimane attorno alla prima metà di ottobre.
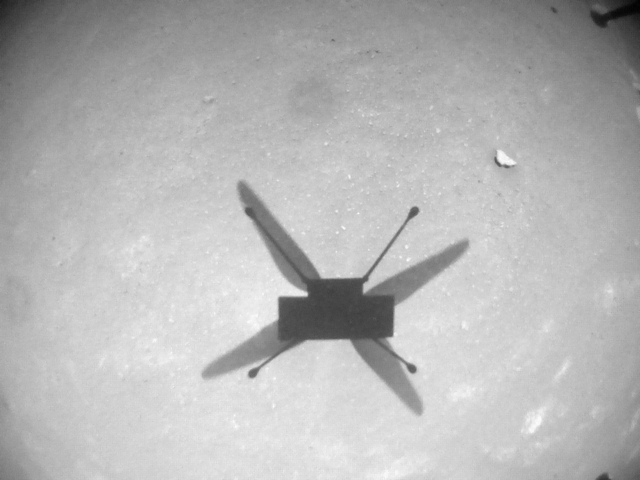
Arriviamo così al Sol 241, 24 ottobre sulla Terra. In questa giornata viene provato e portato a segno il volo stazionario di test. Oltre a essere il primo sollevamento in aria con le nuove regolazioni, è stata anche la prima volta in cui l’elicottero ha eseguito riprese con alto frame rate (ovvero la frequenza tra un’immagine e la successiva) che è arrivato a 7 fps.
Con queste 182 immagini è stato possibile confezionare un video che conserva una buona fluidità e, più importante, testimonia che le impostazioni di volo funzionano alla perfezione.
Fate caso a come la rotazione delle eliche sia molto vicina alla sincronizzazione con i fotogrammi. La riuscita di un video gradevole non è tuttavia lo scopo di questo effetto. L’utilità principale è semplificare l’elaborazione in tempo reale dei frame da parte dell’elettronica di bordo, che si basa su un sistema di confronto di immagini per rilevare lo spostamento rispetto al suolo (in aggiunta ai sistemi “ciechi” con giroscopi e accelerometri).
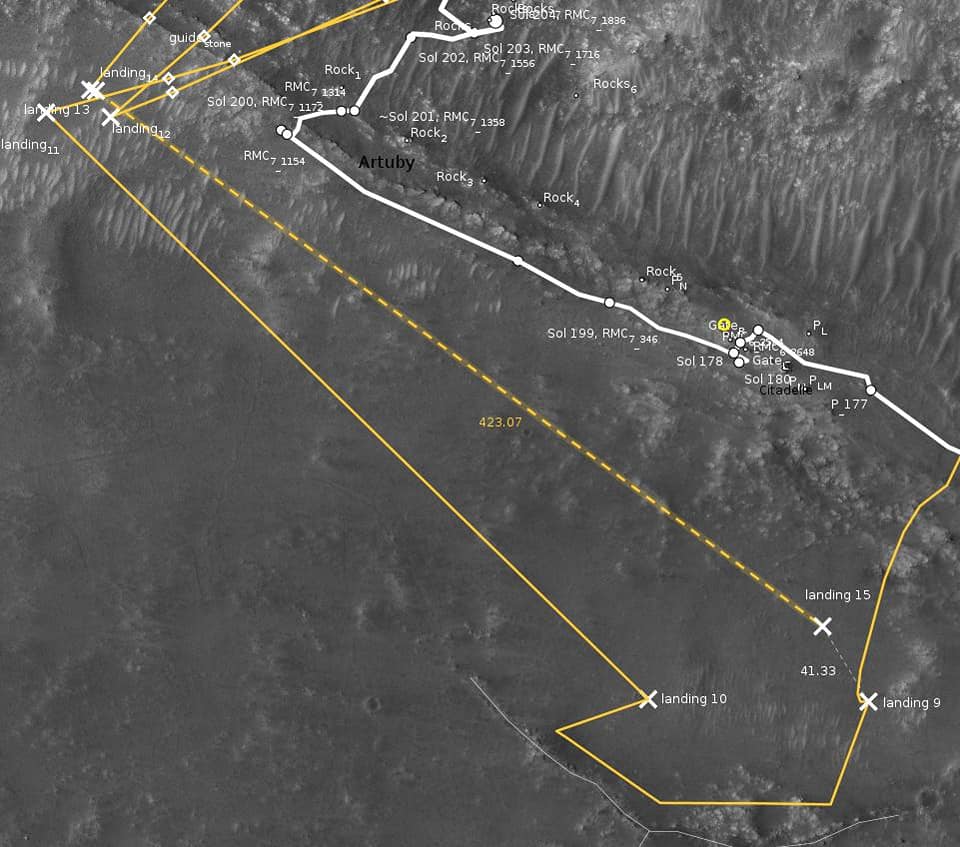
Giungiamo così a inizio novembre, con Ingenuity che il 5 di questo mese ha completato il volo numero 15 spostandosi di 423 metri in 128 secondi.
È iniziato il ritorno verso il Wright Brothers Field (dove si sono svolti i primissimi voli di prova ad aprile) nell’area del sito di atterraggio Octavia E. Butler. L’elicottero continuerà a seguire Perseverance, anch’esso diretto a nord-est prima di proseguire l’esplorazione verso ovest dove si trova il delta dell’antico fiume che miliardi di anni fa scorreva in questa regione. Il cratere Jezero fu infatti un lago, e il cuore della missione Mars 2020 è trovare le cosiddette biosignature, marcatori di una passata vita microbica.
È iniziato il ritorno verso il Wright Brothers Field (dove si sono svolti i primissimi voli di prova ad aprile) nell’area del sito di atterraggio Octavia E. Butler. L’elicottero continuerà a seguire Perseverance, anch’esso diretto a nord-est prima di proseguire l’esplorazione verso ovest dove si trova il delta dell’antico fiume che miliardi di anni fa scorreva in questa regione. Il cratere Jezero fu infatti un lago, e il cuore della missione Mars 2020 è trovare le cosiddette biosignature, marcatori di una passata vita microbica.

Se siete interessati ai dettagli tecnici, potete trovare le fonti e maggiori informazioni sulla sequenza di eventi condensata nell’articolo andando ai seguenti link:

Commenta per primo!
Aggiungi un Commento