Ha sfortunatamente perso l’appuntamento l’anno scorso per via di alcuni ritardi accumulati nei test, e il lancio è stato rimandato a settembre 2022 in concomitanza con la prossima opposizione di Marte.
Parliamo di ExoMars 2022, la missione che l’Agenzia Spaziale Europea sta mettendo a punto in collaborazione con l’agenzia russa Roscosmos. Di gran rilievo il contributo dell’ASI, che vede l’Italia in prima fila anche perché a Torino si è stanziato il centro di controllo e si stanno completando i test di funzionalità.
Il protagonista della missione sarà il rover, battezzato Rosalind Franklin. Sei ruote, alimentazione solare, numerose fotocamere e soprattutto un potente trapano. Quest’ultimo strumento gli pemetterà di eseguire perforazioni e prelevare campioni di roccia marziana che arriveranno a profondità mai tentate per una missione extraterrestre, ben due metri.
Proprio i test di funzionalità del trapano sono i primi che voglio mostrarvi in questa news, seguiti poi da una fuga da un insabbiamento per concludere con gli ultimissimi test dei paracadute.
Perforazione di profondità
Il video che vi propongo è stato diffuso il 15 settembre. Mostra il rover gemello di Rosalind, impiegato nei test di laboratorio, che esegue una perforazione a 170 cm estraendo con successo un campione di suolo. Ci troviamo a Torino nel Mars Terrain Simulator, la struttura di Altec in cui è stata ricreata una simulazione del terreno che ci si attende il rover dovrà affrontare. Il piccolo pozzo dove è stata eseguita la perforazione è stato riempito con varie rocce e sabbia, con poi della argilla di media durezza posta alla profondità target.
Ad aggiungere complicazioni, perché Marte raramente offre situazioni ideali, la piattaforma è stata inclinata di 8° per testare un prelievo in una regione con lieve inclinazione. Il campione largo circa un cm viene estratto e consegnato alla suite scientifica per le analisi. La costruzione del trapano è stata affidata alla Leonardo.
Fuga dalla trappola di sabbia
Ambientato sempre nel simulatore a Torino, questo video mostra il rover in una situazione molto delicata. Le sei ruote sono state parzialmente insabbiate, limitandone la funzionalità e ponendole nella rischiosa situazione in cui il tentativo di muoversi provoca un ulteriore affondamento. In passato una condizione analoga ha messo a rischio la missione di Opportunity, il rover NASA, richiedendo interventi specifici da parte del team di controllo del JPL.
Per evitare ciò ExoMars è dotato di un sistema di spostamento inedito, nel quale ognuna delle sei gambe può muoversi in modo indipendente avanti e indietro. Combinando questa funzionalità con l’uso degli attuatori nelle ruote, il risultato è che il rover sembra camminare passo dopo passo sulla sabbia. Ma visto che un video vale ben più di mille parole, ecco a voi come si svolge l’azione. L’intero spostamento di 2 metri ha richiesto circa 20 minuti per essere completato.
I paracadute
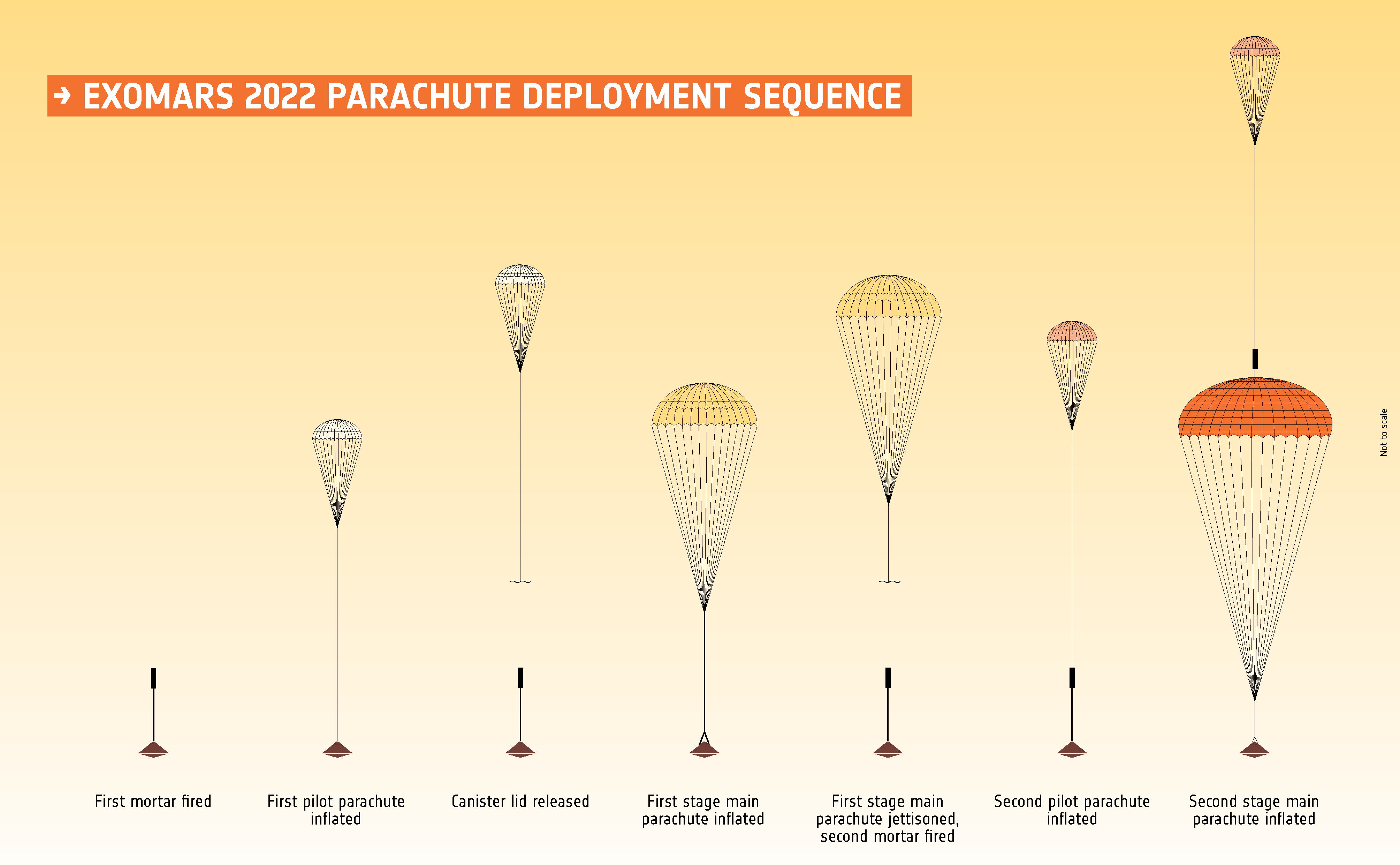
Gli atterraggi su Marte fanno storicamente uso di uno o più paracadute. La massa delle missioni più recenti ha fatto sì che questi dispositivi, col tempo, siano diventati di dimensioni sempre maggiori per dissipare molta energia cinetica. ExoMars non si discosterà da questo trend e potrà contare sul più grande paracadute subsonico mai impiegato nell’atmosfera del pianeta rosso, un bestione di 35 metri di diametro che rappresenta il paracadute principale di secondo stadio. Vista la criticità del componente si sono scelti due fornitori, Arescosmo e Airborne Systems. Al momento l’europea Arescosmo dovrebbe essere la prima scelta, con l’altra compagnia tenuta come backup. Il video sottostante combina i test dei paracadute svoltisi il 21 novembre e il 3 dicembre in Oregon, sotto la supervisione del JPL della NASA. L’esperienza statunitense negli atterraggi marziani è stata messa al servizio dell’ESA, che in tempi recenti ha avuto qualche grattacapo con i precedenti test sui paracadute.
Il dispiegamento del paracadute di secondo stadio sarà preceduto, come intuibile, dall’apertura del paracadute principale di primo stadio da 15 metri. Questa operazione avverrà quando il modulo di trasporto starà viaggiando ancora a velocità ultrasoniche. In questo caso si è scelto un fornitore unico, la già menzionata Airborne Systems.
Qui di seguito il video con il test sul paracaduto di primo stadio eseguito il 24 giugno.
Per aiutarvi nell’orientamento con tutti questi paracadute, allego anche uno schema con la sequenza di apertura di quelli di cui sarà dotato il lander ExoMars. Oltre ai principali menzionati, sono presenti altri due paracadute cosiddetti pilota che aiutano a orientare il modulo di trasporto e agevolano l’apertura dei paracadute principali.
Link di approfondimenti:
https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/First_deep_drilling_success_for_ExoMars
https://www.esa.int/ESA_Multimedia/Videos/2021/12/Rover_escapes_from_sand_trap
https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/Double_drop_test_success_for_ExoMars_parachutes
https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/Exploration/ExoMars/First_high-altitude_drop_test_success_for_ExoMars_parachute


Grazie! Articolo interessantissimo e molto ben documentato.